EllipticalGaussian2DKernel¶
- class radio_beam.EllipticalGaussian2DKernel(stddev_maj, stddev_min, position_angle, support_scaling=8, **kwargs)[source]¶
Bases:
Kernel2D2D Elliptical Gaussian filter kernel.
The Gaussian filter is a filter with great smoothing properties. It is isotropic and does not produce artifacts.
- Parameters:
- stddev_majfloat
Standard deviation of the Gaussian kernel in direction 1
- stddev_minfloat
Standard deviation of the Gaussian kernel in direction 1
- position_anglefloat
Position angle of the elliptical gaussian
- x_sizeodd int, optional
Size in x direction of the kernel array. Default = support_scaling * stddev.
- y_sizeodd int, optional
Size in y direction of the kernel array. Default = support_scaling * stddev.
- support_scalingint
The amount to scale the stddev to determine the size of the kernel
- modestr, optional
- One of the following discretization modes:
- ‘center’ (default)
Discretize model by taking the value at the center of the bin.
- ‘linear_interp’
Discretize model by performing a bilinear interpolation between the values at the corners of the bin.
- ‘oversample’
Discretize model by taking the average on an oversampled grid.
- ‘integrate’
Discretize model by integrating the model over the bin.
- factornumber, optional
Factor of oversampling. Default factor = 10.
See also
Box2DKernel,Tophat2DKernel,MexicanHat2DKernel,Ring2DKernelTrapezoidDisk2DKernel,AiryDisk2DKernel,Gaussian2DKernelEllipticalTophat2DKernel
Examples
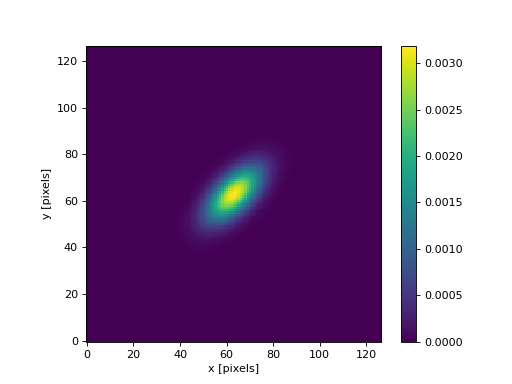
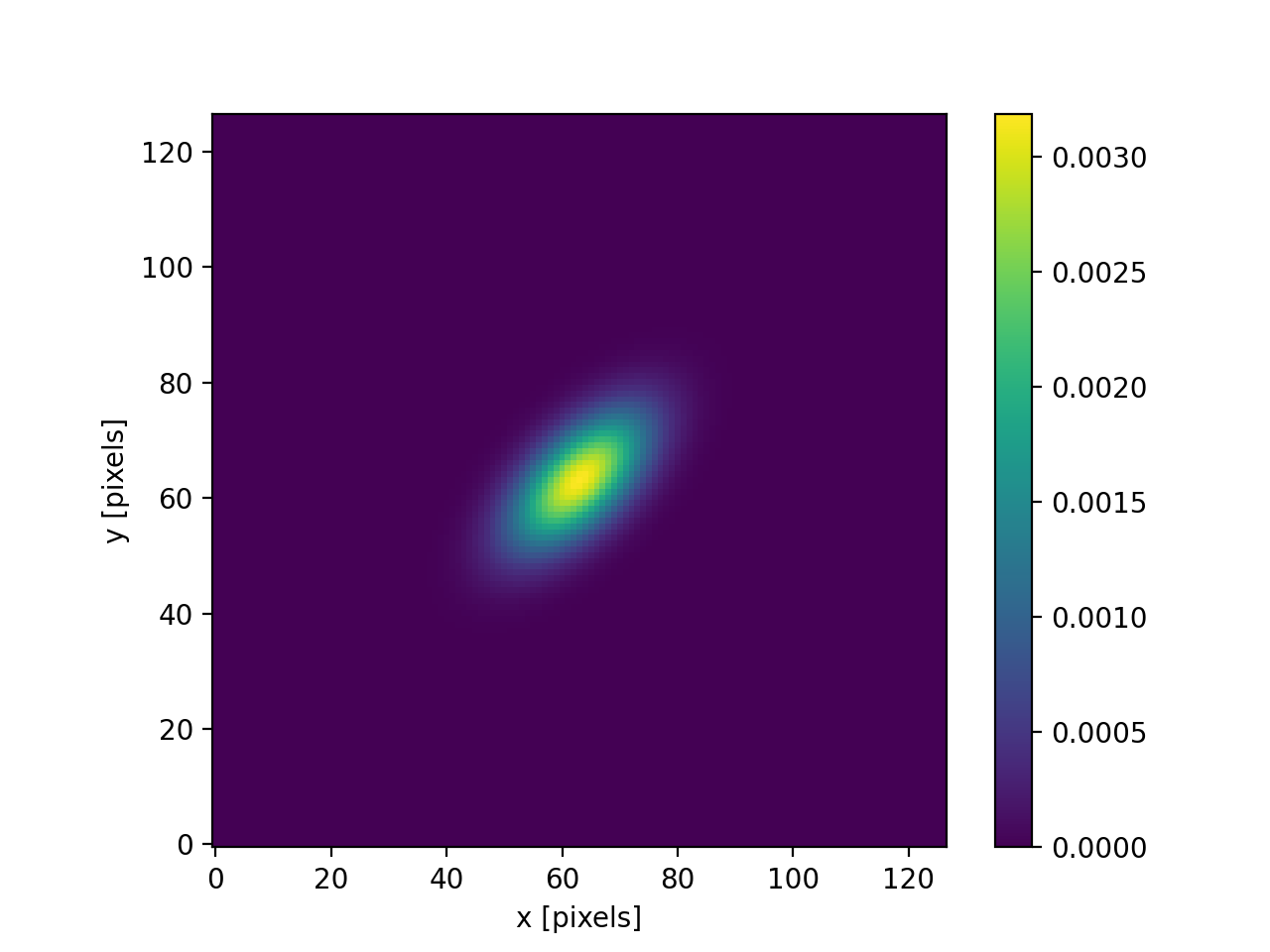
Kernel response:
import matplotlib.pyplot as plt from radio_beam import EllipticalGaussian2DKernel gaussian_2D_kernel = EllipticalGaussian2DKernel(10, 5, np.pi/4) plt.imshow(gaussian_2D_kernel, interpolation='none', origin='lower') plt.xlabel('x [pixels]') plt.ylabel('y [pixels]') plt.colorbar() plt.show()
(
Source code,png,hires.png,pdf)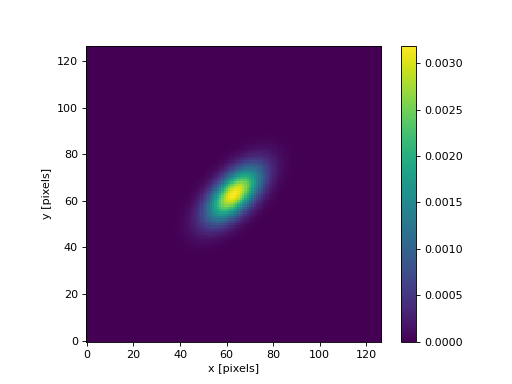
Attributes Summary
Filter kernel array.
Index of the kernel center.
Kernel dimension.
Indicates if kernel is bool.
Kernel response model.
Indicates if the filter kernel is separable.
Shape of the kernel array.
Absolute deviation of the sum of the kernel array values from one.
Methods Summary
normalize([mode])Normalize the filter kernel.
Attributes Documentation
- array¶
Filter kernel array.
- center¶
Index of the kernel center.
- dimension¶
Kernel dimension.
- is_bool¶
Indicates if kernel is bool.
If the kernel is bool the multiplication in the convolution could be omitted, to increase the performance.
- model¶
Kernel response model.
- separable¶
Indicates if the filter kernel is separable.
A 2D filter is separable, when its filter array can be written as the outer product of two 1D arrays.
If a filter kernel is separable, higher dimension convolutions will be performed by applying the 1D filter array consecutively on every dimension. This is significantly faster, than using a filter array with the same dimension.
- shape¶
Shape of the kernel array.
- truncation¶
Absolute deviation of the sum of the kernel array values from one.
Methods Documentation
- normalize(mode='integral')¶
Normalize the filter kernel.
- Parameters:
- mode{‘integral’, ‘peak’}
- One of the following modes:
- ‘integral’ (default)
Kernel is normalized such that its integral = 1.
- ‘peak’
Kernel is normalized such that its peak = 1.
{kind=link}
{kind=link}